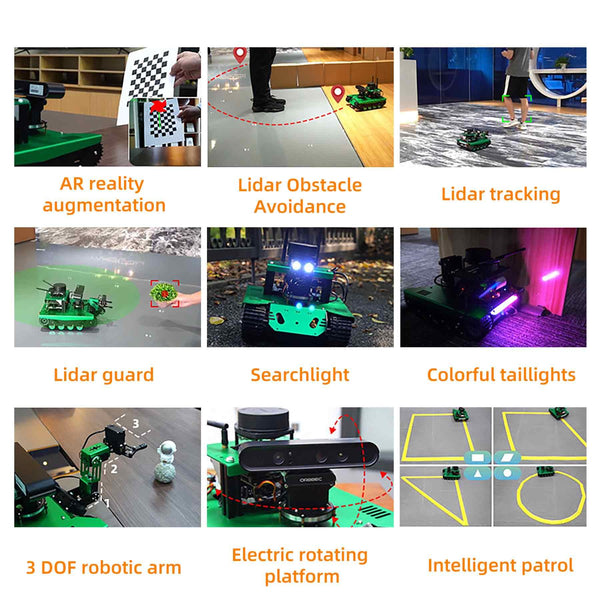
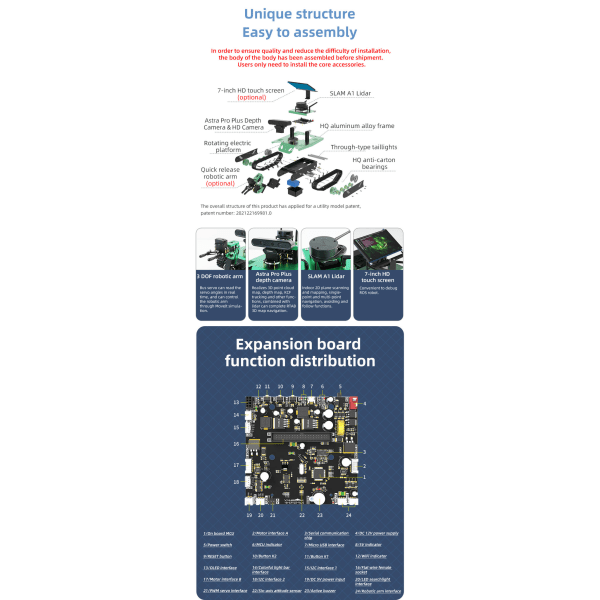
en crawler-off-road-robot baseret på ROS(robotoperativsystem) og Python-programmering, som er designet til ROS-entusiaster og robotspillere. Den er udstyret med højtydende hardwarekonfigurationer såsom Lidar, HD-kamera/dybdekamera osv., som kan realisere applikationer som robotbevægelseskontrol, fjernkommunikation, kortnavigation, følg-undgåelse, autopilot og robotarm MoveIt-simulering. En masse undervisningsdokumenter og videoer, der hjælper dig med at komme i gang med ROS nemt. Crawler-type, der understøtter hurtig installation af robotarme: Hele køretøjet er lavet af grønt aluminiumoxidlegeringsmateriale, der understøtter installationen af robotarme, 2DOF-kamerahoveder, 7-tommer skærme osv. Brugere kan fejlsøge deres biler når som helst og hvor som helst.
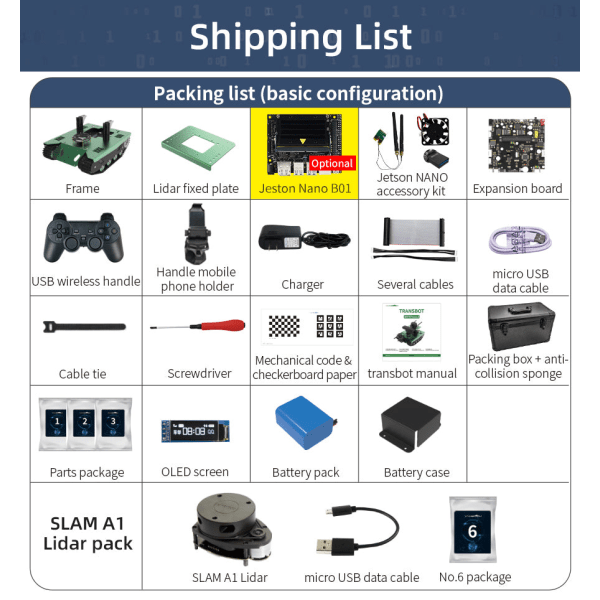
Professionel hardwarekonfiguration: SLAM LiDAR, high-definition kamera/dybdekamera, kraftfuld kodningsgearmotor, metalservo, robotudvidelseskort osv.
Baseret på ROS (Robot Operating System) og Python-programmering: Vi brugte smart Rviz-, Movelt- og Qt-værktøjskasserne i robotoperativsystemet til at opnå fælles kontrol af robotarmen Movelt-simulering og ægte maskine.
Spændende AI-funktioner: LiDAR-undgåelse, navigation med faste punkter, knogledetektion, fingersporing, kamerakalibrering, 3D-visuel kortlægningsnavigation og mere.
Sammenkoblingskontrol på tværs af platforme: En mobil fjernbetjeningsapp, der integrerer flere AI-funktioner; Håndter kontrol, der kan opleve visuelle effekter i realtid af FPV, JupyterLab online programmering og kontrol af robotter.
Detaljerede videoundervisningskurser: Vi leverer 64 videotutorials og detaljeret dokumentation. Uanset om du er nybegynder eller erfaren ROS-spiller, kan du nemt bruge denne robot.







")

")
")
